Context
The solar-powered GPS tracker was born from a specific need in high-altitude trekking: a secondary, rugged positioning tool independent of fragile smartphone batteries and proprietary cloud ecosystems. While smartphones are powerful, their battery life is insufficient for multi-day expeditions, and standard GPS coordinates (Lat/Lon) are difficult to use quickly with traditional paper maps.
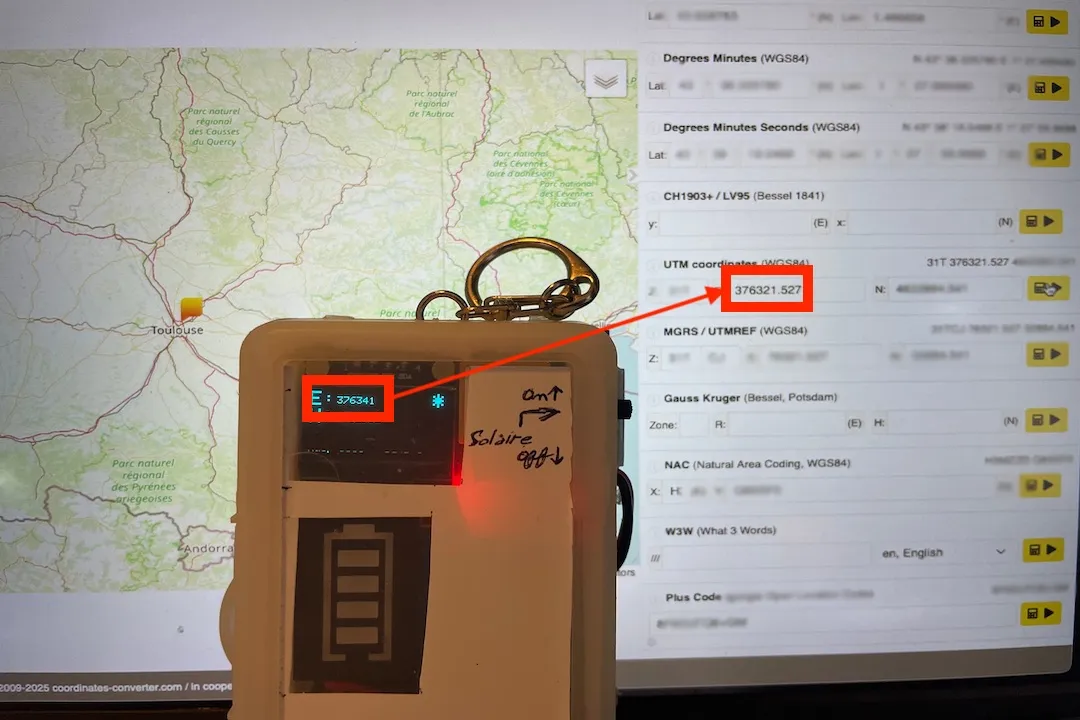
The goal was to design an autonomous device capable of providing high-precision UTM (Universal Transverse Mercator) coordinates, formatted specifically for IGN hiking maps.
Technical Constraints and Embedded Logic
The project is built on the Arduino Nano platform (32 KB flash, 2 KB SRAM), which imposes significant resource constraints. Managing complex geodetic calculations on a chip with only 2 KB of SRAM required a highly optimized approach to memory management.
Coordinate Transformation Engine
The core technical challenge was real-time conversion of raw GPS sentences into UTM coordinates. Rather than using heavy external libraries, I implemented:
- Matrix Transformations: Custom C++ routines perform the conversion directly to minimize load on the AVR architecture
- Memory Optimization: Use of
F()andPROGMEMmacros to keep string constants in flash memory, avoiding SRAM saturation during intensive calculations - Separated Logic: The firmware decouples serial parsing of NMEA sentences (via TinyGPS++) from display rendering logic for smooth updates without losing GPS packets
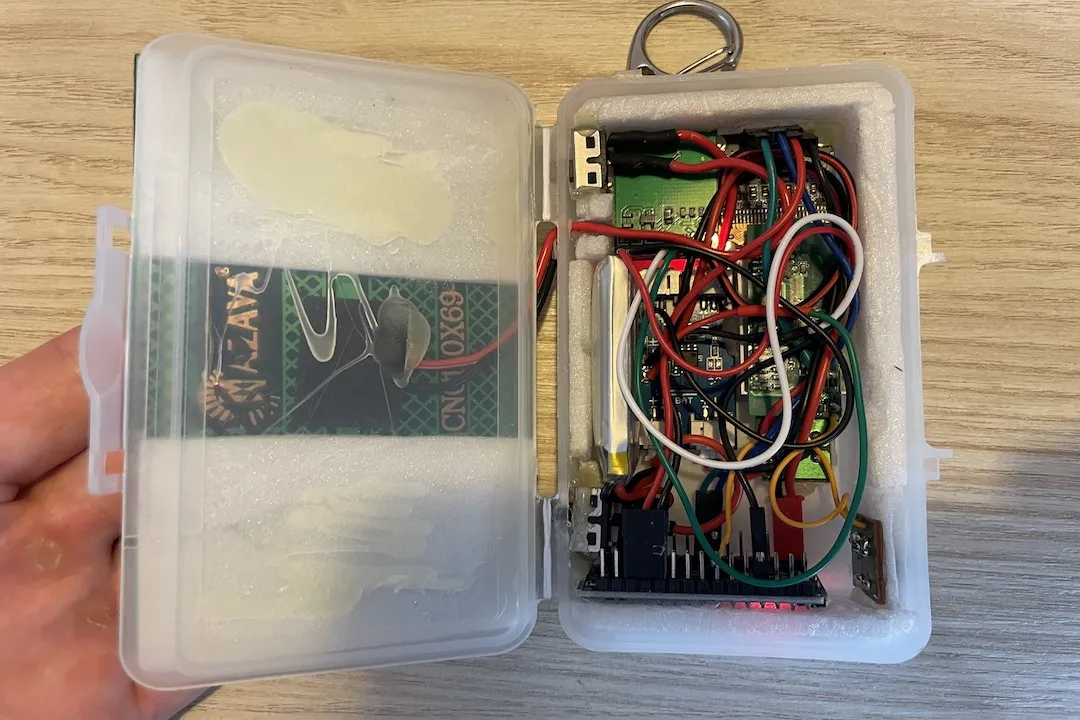
Hardware Engineering and Power Autonomy
For a device intended for the outdoors, durability and energy management were treated as priority requirements.
Solar Charging Circuit
For indefinite autonomy, I designed a dedicated power subsystem:
- TP4056 Integration: A dedicated lithium battery charger handles input from a compact solar panel
- Regulated Output: The system provides a stable 5 V supply to the GPS module and OLED display, regardless of sunlight variations
Rugged Interface
The user interface relies on a high-contrast I²C OLED display (Adafruit SSD1306), readable in direct sunlight. It displays data across 3 navigation pages:
- Live UTM coordinates (East/North)
- Live Lat/Lon coordinates
- Current altitude, heading, and speed
- Signal quality and satellite lock status
- Real-time battery and charging metrics
The GPS module (Quectel L80RE) connects via serial and achieves roughly ±5 m accuracy in mountain environments, sufficient for terrain navigation with paper maps.
Technical Constraints and Tradeoffs
The main tradeoff was between feature density and system stability. Early versions suffered from stack overflows due to the complexity of geodetic calculations. By refining matrix operations and replacing the String library with C-style strings (character arrays), I reduced the memory footprint by about 40%, enabling more reliable long-term operation.
Technical Stack
- Platform: Arduino Nano (AVR, direct register usage when needed)
- GPS: Quectel L80RE, TinyGPS++ for NMEA parsing
- Display: Adafruit SSD1306 (I²C OLED)
- Power: TP4056 charger, Li-Po battery, solar panel
- Source: Arduino-GPS-Display — full code, PCB schematics, wiring diagrams
Takeaway
This tracker illustrates a successful intersection of low-level embedded programming and field utility. It shows that with limited hardware like the Arduino Nano, it is possible to build specialized tools of high utility by prioritizing mathematical optimization and energy efficiency. It remains a trusted companion on the trails, serving as a reliable bridge between digital precision and physical paper maps.